
Dr Ryne Beeson, Senior Scientist at CU Aerospace, shares new and enabling capabilities optimising the design of spacecraft trajectories to achieve mission objectives.
The advent of new space technology, the greater coupling of space systems, and more frequent access to space has given rise to new challenges and opportunities for space mission design. Low-thrust propulsion has reached technology maturation and is being flown onboard small satellites and large spacecraft for orbit raising and correction manoeuvres in Earth orbits, on missions in the Cislunar realm (see Fig. 1), as well as interplanetary discovery missions. The miniaturisation of electronics, improvements of onboard computers, sensors, communications, and onboard software enabling more autonomy of spacecraft also means that smaller satellites and spacecraft are capable of more, and can be developed, tested, and launched on shorter timelines, and for less cost than before.
More frequent access to space through a greater number of launch providers, and at reduced costs, further encourages an appetite for increased mission risk with a reduction in mission development timeline and costs. Together, these elements create new pressure on the traditional process for designing spacecraft trajectories to achieve mission objectives.
Spacecraft trajectory optimisation is the process of synthesising a control law for the spacecraft thrusters such that a defined mission objective is extremised (e.g., maximise delivered mass or minimise time-of-flight) and mission constraints are satisfied. Optimised trajectories enable missions that otherwise would not have been flyable (e.g., the Hiten spacecraft) or improve margins such that new capabilities can be realised.
Trajectory design proceeds through multiple phases. The first phase is called the preliminary design phase, and it is here that a trade-off is currently made between the physics fidelity of simulations (longer run-time with higher fidelity) and the global search for the best trajectory solutions (longer run-time for more extensive searches). Low fidelity solutions cannot always be continued into high fidelity. The ultimate goal would be for a software that could autonomously and efficiently search for solutions at high fidelity.
New technologies such as low-thrust propulsion make trajectory design much more computationally intensive versus the traditional impulsive thrust case. Low-thrust propulsion also introduces new constraints to the optimisation problem. For example, the need to account for power generation from solar panels, makes the optimisation problem more complex. Designing these types of trajectories in multiple gravitational body environments becomes very unintuitive because flight time durations are long and small perturbations over these long timespans amount to significant trajectory deviations.
CU Aerospace (CUA), located in Champaign, Illinois, USA, has been developing several innovative software technologies that enable spacecraft trajectory optimisation at higher fidelities and with quicker time to solution at all levels of the mission design process.
Dynamically Leveraged Automated (N) Multibody Trajectory Optimisation
CUA’s Dynamically Leveraged Automated (N) Multibody Trajectory Optimisation (DyLAN) software enables automated multiple objective global trajectory optimisation for both low-thrust and impulsive thrust in multiple gravitational body environments. DyLAN achieves this at a medium-high physics fidelity, which supports accurate preliminary mission design. The software is written in C++, has both a C++ and Python interface, is supported on Linux, macOS, and Windows 10, and supports parallel processing to reduce time to solution.
DyLAN provides several new capabilities for trajectory design in the multiple body regime. The most important is a seamless blending of dynamical systems concepts with state-of-the-art global optimisation techniques. A useful dynamical model in this realm is the circular restricted three-body model, which has geometric structures called invariant manifolds that asymptotically tend toward libration orbits forwards or backwards in time; the James Webb Telescope will use a type of libration orbit as its final destination, as will the space station Gateway for the Artemis programme.
The invariant manifolds bound the dynamical flows from one region to another in the three-body model. DyLAN can discover structures and target them as boundary conditions to accelerate the optimisation procedure. CUA is also developing the Suite of Lagrangian Coherent Structures (SuiteLCS) software that will provide the capability to find the generalisations of invariant manifolds for general n-body models.
DyLAN uses a hybrid optimisation architecture, whereby the optimisation problem is split into two levels. The first level optimises control variables that take integer values, for example to specify different dynamical structures to be used for transit. This first level is solved with a genetic algorithm (GA) that evolves over many iterations to find the best global structure for the trajectory optimisation problem.
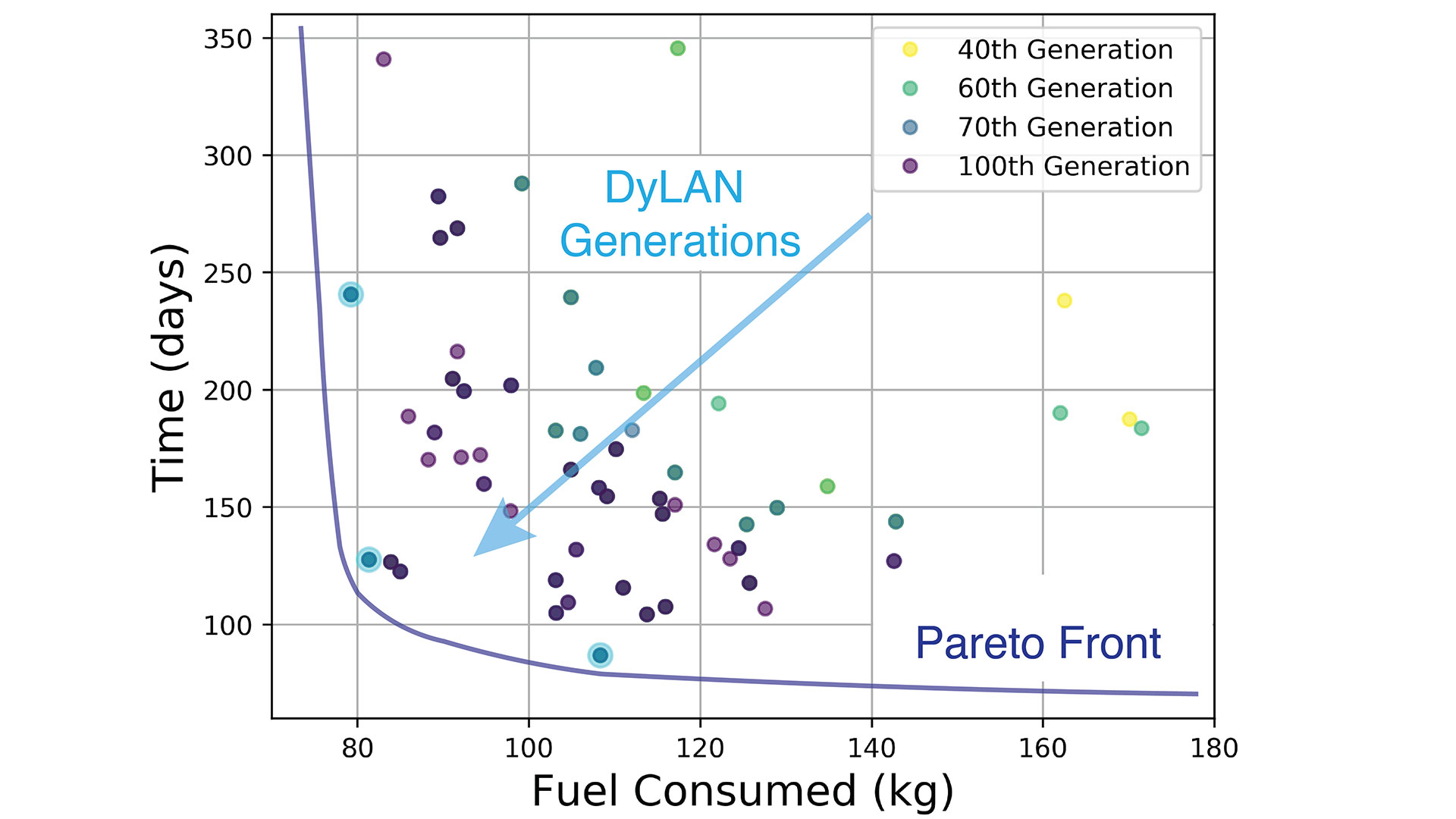
The second level optimises continuous control variables, for example the thrust magnitude and direction. The second level is solved using a direct optimisation approach, where a multiple shooting control transcription converts the optimal control problem into a nonlinear program (NLP). The NLP is then solved by an NLP solver. The NLP requires an initial guess for the control states. DyLAN uses a monotonic basin hopping (MBH) initial guess generator, which samples both globally and locally from the state space to help discover the many near global minima that exists in spacecraft trajectory problems. Both the GA and MBH enable DyLAN to solve the trajectory optimisation problem in an automated fashion. DyLAN also possesses a non-dominated sorting genetic algorithm (NSGA-II) for solving multiple objective trajectory problems (see Fig. 2).
Parallel nonlinear programming solvers
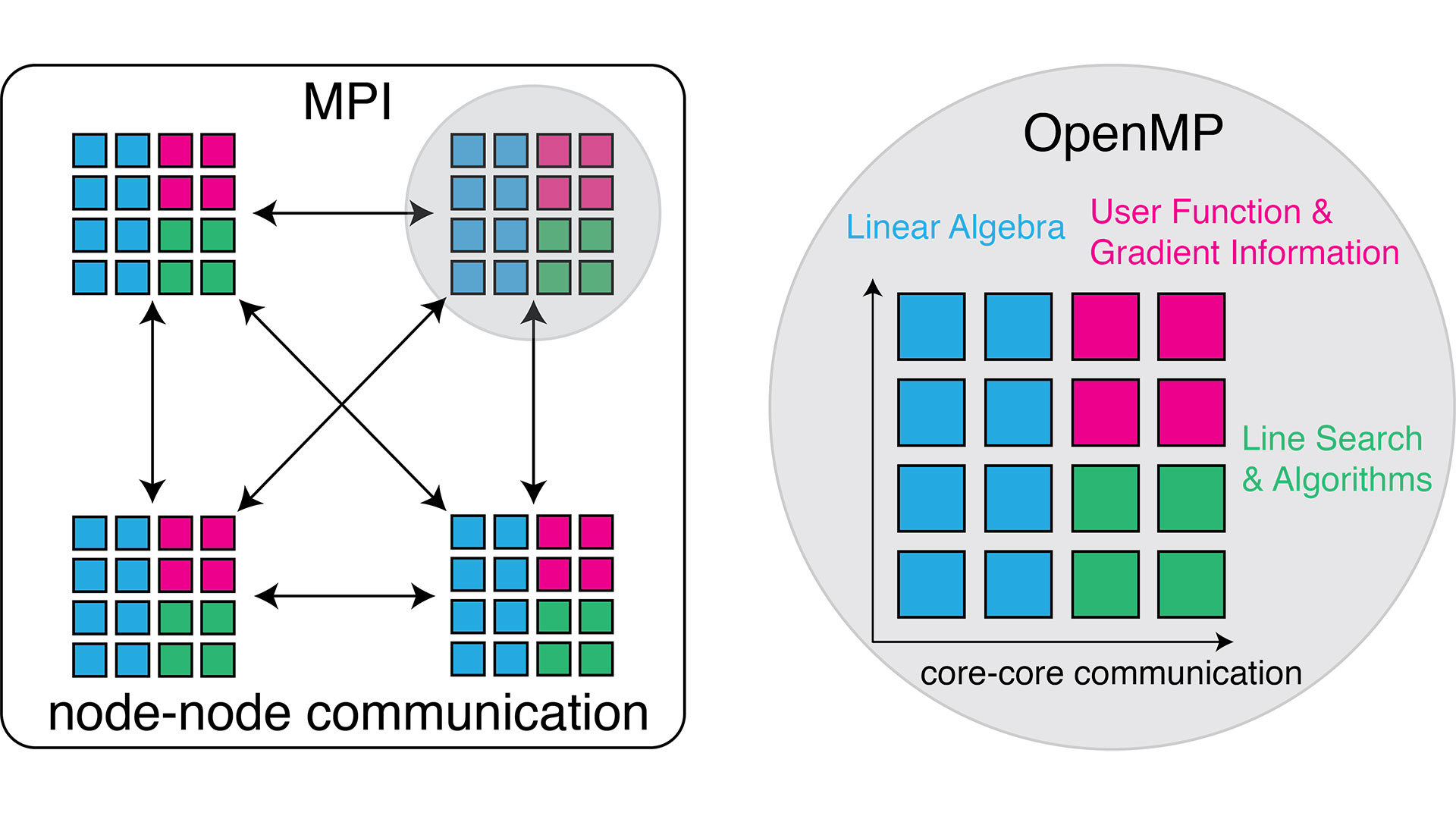
The NLP optimisation problem formulated within DyLAN is a very general and flexible type of optimisation problem. It allows for a nonlinear objective function and nonlinear constraints with continuous real variable (control) states. Motivated by the fact that solution of the NLP within spacecraft trajectory optimisation software such as DyLAN is a computational bottleneck, and the only component that had yet to be parallelised in trajectory toolchains, CUA embarked on the development of NLP solvers that could harness distributed and shared memory architectures for parallel solution of NLPs. The result has been the creation of CUA’s Nonlinear Parallel Optimisation Tool (NLPAROPT) for distributed memory architectures using the message passing interface (MPI) and CUA OpenMP Nonlinear Optimisation Tool (COMPNOT) for shared memory architectures (see Fig. 3). Both software packages are written in C++ and supported across the Linux, macOS, and Windows 10 operating systems.
NLPAROPT and COMPNOT can be applied to general NLPs outside the realm of trajectory optimisation, for example structural (topology) optimisation, network optimisation, as well as problems in finance. The focus has been on solving large sparse NLPs, along with the ability to use analytic derivatives or sparsity patterns of the Jacobian, the ability to discover the sparsity pattern and generate the Jacobian via finite differencing methods, and the ability to use either active set methods or interior point methods for solution of the quadratic subproblems. NLPAROPT and COMPNOT use parallelisation in BLAS and LAPACK linear algebra operations, line searches, and finite differencing to accelerate solution solves.
CUA expects parallel optimisers, such as NLPAROPT and COMPNOT, to become crucial tools in engineering as timelines become more aggressive, access to computational resources continues to increase, and pressure to optimise for improved margins continues. Similarly, increasing desire for higher fidelity automated spacecraft trajectory design tools will ensure DyLAN and SuiteLCS become prominent software for space mission design.
Design tool for modular satellites
CUA is preparing an early-2021 release of its Satellite Evolvable Platform Tool for Expandability and Reusability (SEPTER) software toolkit that provides architectural and configuration optimisation for reconfigurable space platforms based on commercially available or user-provided parts and form-factor selections. This tool was created to support the design and optimisation of a modular, expandable bus platform that can serve a multitude of payloads for specialised scientific missions.
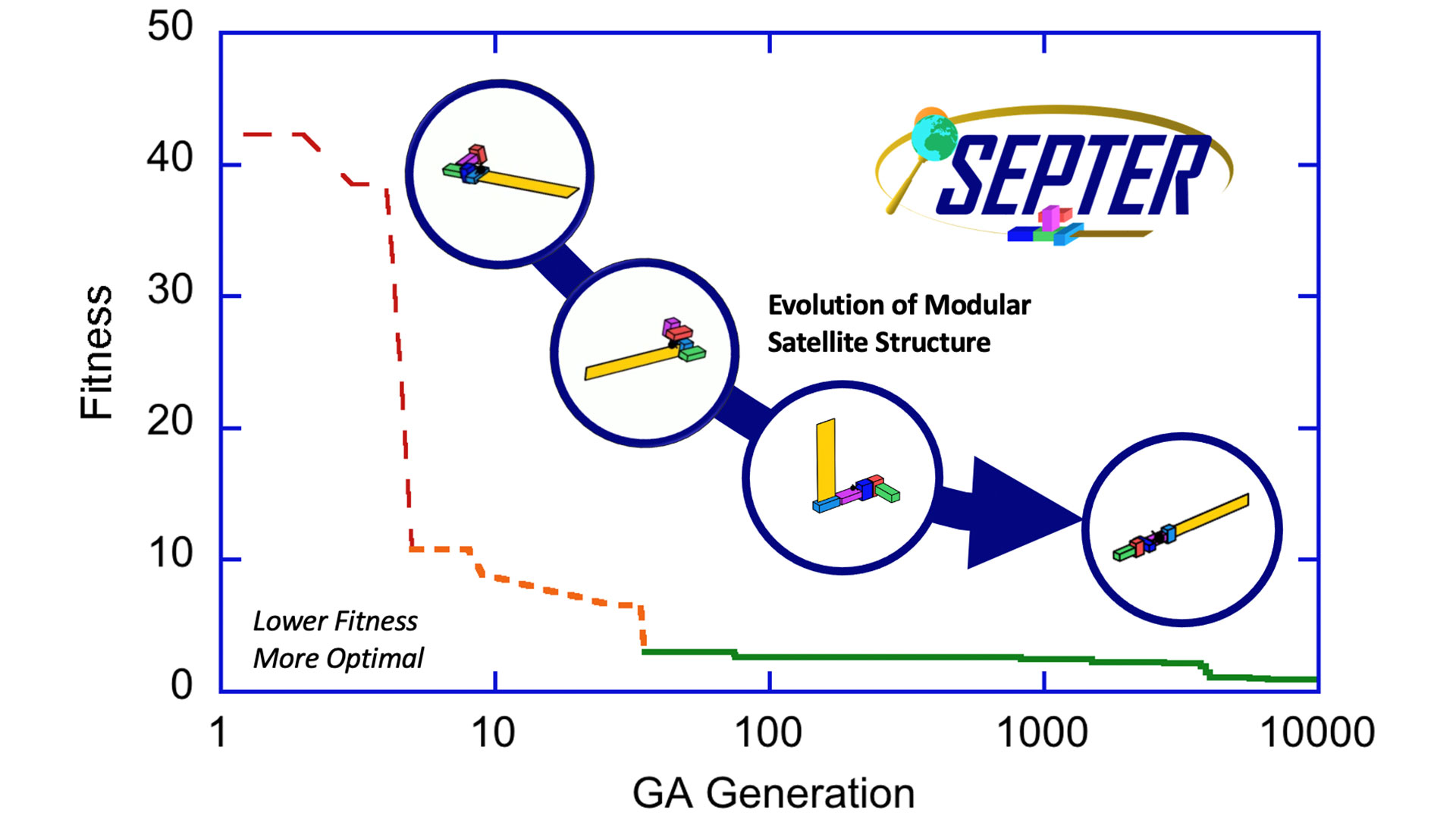
This tool considers the desired orbital environment and module form factor to produce a highly optimised first-order solution set for preferred and compliant platforms. In addition, SEPTER has a variety of features for configuration optimisation, including the ability to consider pointing constraints, field-of-view requirements, and keep-out zones on a module-by-module basis, each of which may be ranked or weighted by the user to further customise the resultant morphology.




